Manufaa ya Maono ya Pseudo-Koaxial katika Uwekaji Alama wa Laser wa PCB
Huu hapa ni muhtasari wa manufaa ya kutumia Pseudo-Coaxial Vision (ambayo mara nyingi hurejelewa katika muktadha huu kama Kupitia-the-Lens au TTL vision, au Coaxial Vision kupitia kiunganisha boriti) ikilinganishwa na Maono ya Off-Axis (Side-Axis) kwa uwekaji alama wa leza ya ndani ya misimbo ya QR kwenye PCB.
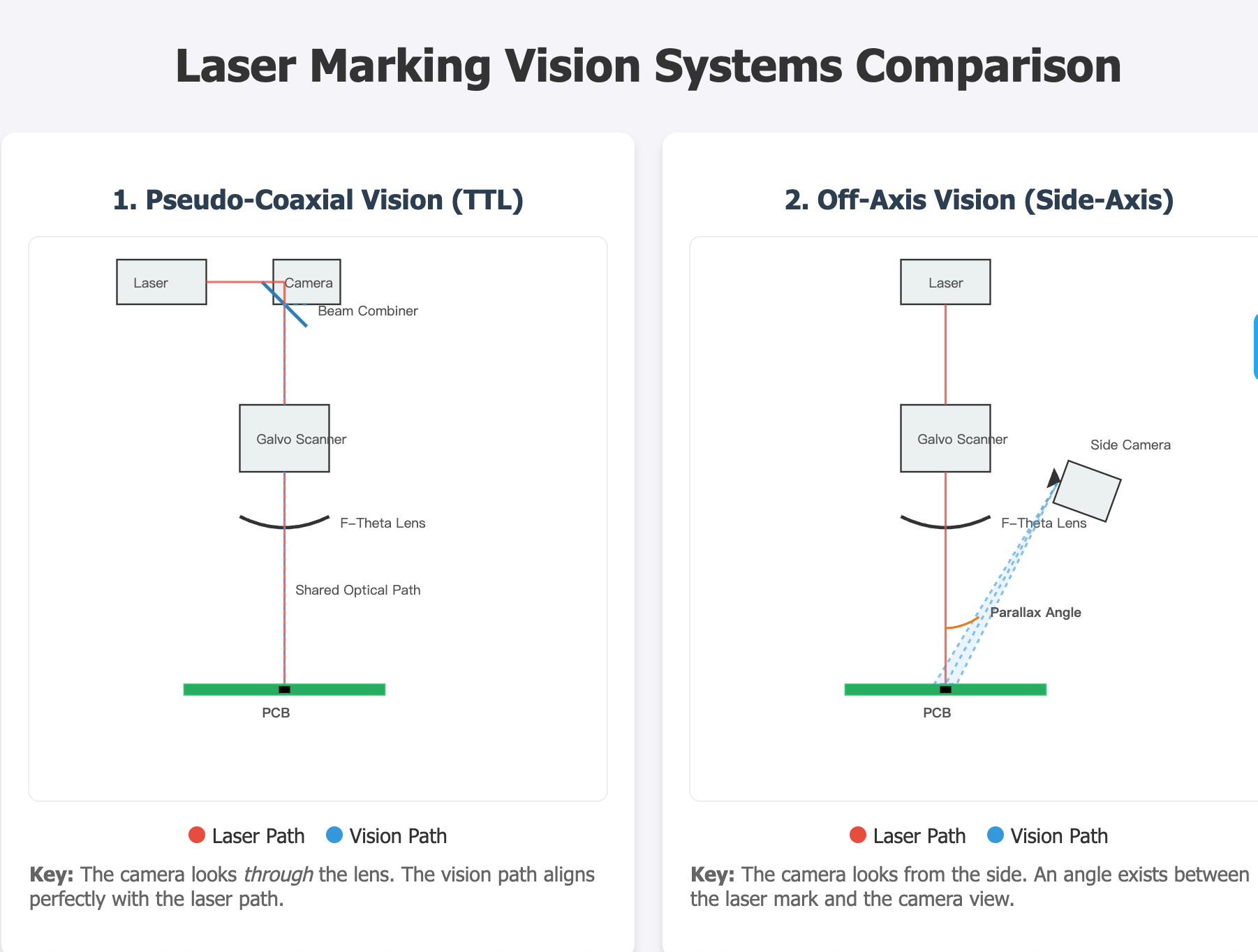
Maono ya Pseudo-Koaxial
( Maono ya Nje ya Mhimili (Mhimili wa Upande )
1. Urekebishaji Bora na Usahihi wa Ulinganifu
• Njia ya Macho ya Moja kwa Moja: Katika mfumo wa pseudo-coaxial, kamera ya kuona hushiriki njia sawa ya macho (kawaida kupitia kioo cha dichroic au kiunganisha boriti) kama boriti ya leza. Hii inamaanisha kuwa kamera 'inaona' kile laser 'inachoona.'
• Kuondoa Hitilafu ya Parallax: Kamera za nje ya mhimili hutazama lengo kutoka pembe. Ikiwa urefu wa PCB utabadilika (ukurasa wa kivita) au mwelekeo wa Z-axis ukibadilika, nafasi ya alama katika mwonekano wa kamera hubadilika kulingana na mkao halisi wa leza. Maono ya bandia huondoa hitilafu hii ya parallax, na kuhakikisha kuwa leza inaweka alama mahali ambapo mfumo wa maono unalenga, bila kujali tofauti kidogo za urefu.
2. Ubunifu wa Mitambo Ulioboreshwa na Uliorahisishwa
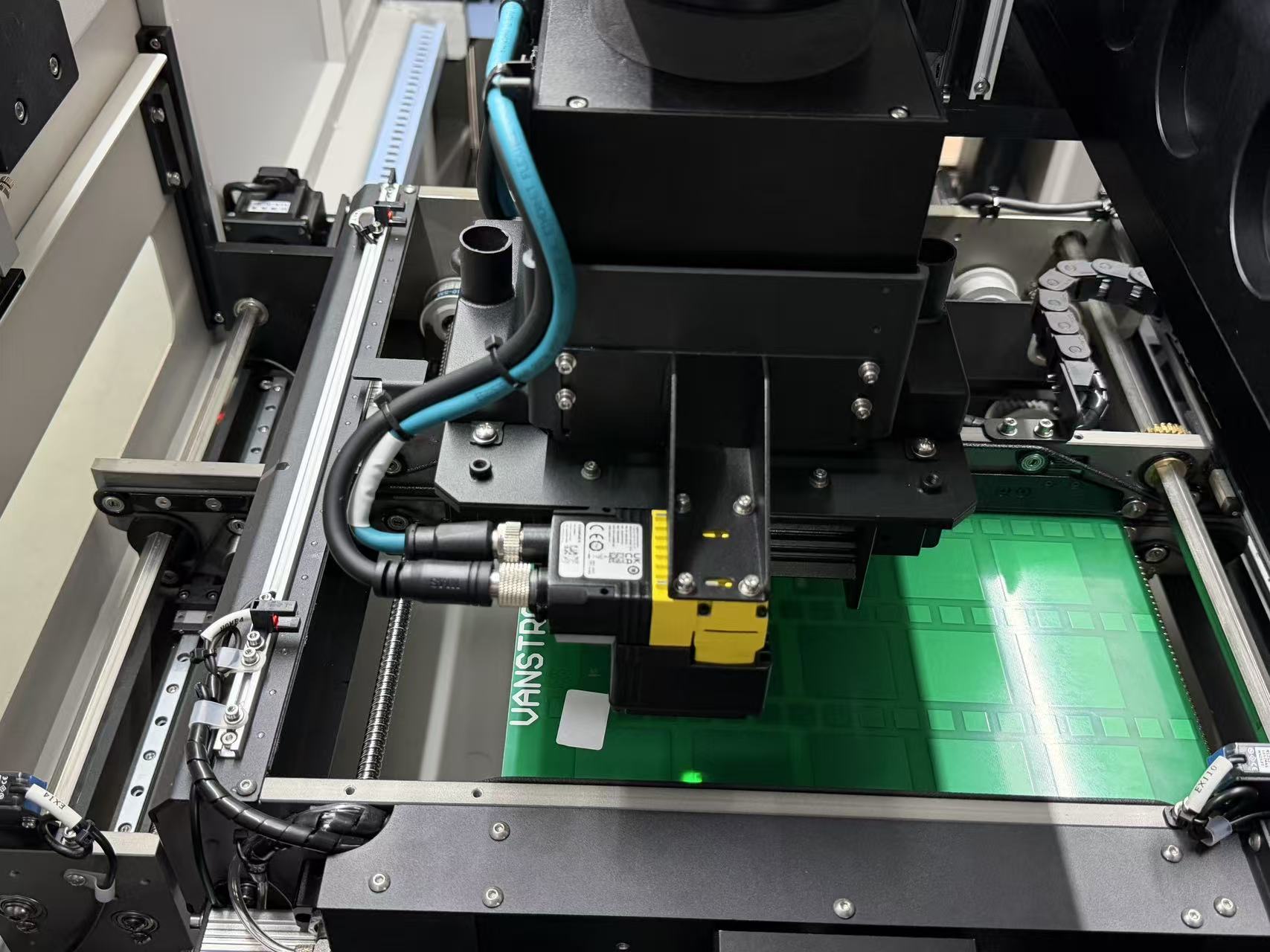
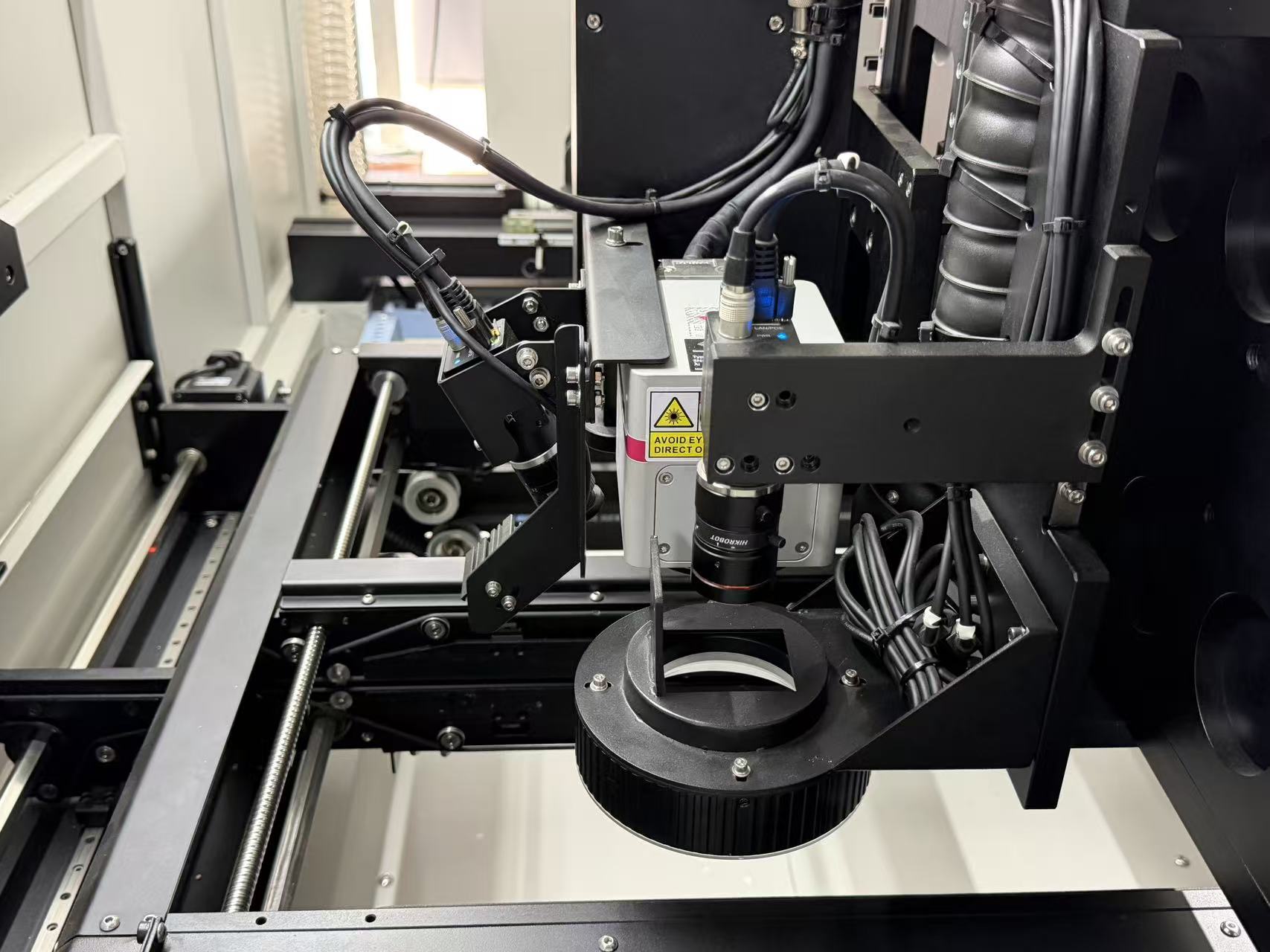
• Ufanisi wa Nafasi: Vifaa vya kushughulikia vya PCB vya Inline mara nyingi huwa na nafasi ndogo. Usanidi wa bandia-coaxial huunganisha kamera moja kwa moja kwenye kichwa cha kuchanganua cha galvanometer au njia ya macho ya leza. Hii huondoa hitaji la mabano makubwa ya kamera ya nje na taa zinazoning'inia kando ya kichwa cha leza.
• Kuingilia kwa Kupunguzwa: Hakuna hatari ya kamera ya nje kugongana kimwili na vipengele kwenye PCB au utaratibu wa conveyor.
3. Wakati Halisi 'Unachokiona Ndicho Unachotia Alama' (WYSIWYM)
• Uigaji wa Kuweka Alama Mapema: Unaweza kuweka kiolezo cha kuashiria moja kwa moja kwenye mpasho wa video ya moja kwa moja kwa usahihi wa juu sana. Hii inafanya usanidi na uundaji wa mapishi kuwa angavu zaidi kwa waendeshaji.
• Uthibitishaji Baada ya Kuweka Alama: Kwa sababu kamera hutazama kupitia lenzi ya kuchanganua (F-theta lenzi), inaweza kuthibitisha mara moja ubora wa alama na mkao bila kuhamisha galvanometer au PCB hadi kituo tofauti cha ukaguzi.
4. Uimara Dhidi ya Makosa ya PCB na Kuweka Nafasi
• Upatanifu wa Kuzingatia Kiotomatiki: Ikiwa mfumo umewekewa kitengo cha kulenga chenye nguvu cha 3D, kamera ya coaxial inaweza kusaidia katika kubainisha ndege inayolenga kwa usahihi zaidi kuliko kamera yenye kona, ambayo inatatizika na utambuzi wa kina.
• Marekebisho ya Upotoshaji: Kamera za nje ya mhimili zinahitaji urekebishaji changamano wa programu ili kurekebisha upotoshaji wa trapezoida unaosababishwa na pembe ya kutazama. Maono ya coaxial hutazama uga (zaidi) kwa uwazi, kupunguza upotoshaji wa mtazamo na kurahisisha algoriti za kuchakata picha zinazohitajika ili kusoma misimbo ya Data Matrix (ECC200) yenye msongamano wa juu.
5. Uwekaji wa Alama ya Juu ya Usahihi kwenye Vipengele Vidogo
• Upangaji wa Maeneo ya Mwonekano (FOV): Kwa PCB zenye msongamano mkubwa ambapo misimbo ya QR lazima iwekwe kwenye sehemu ndogo sana (km, mikebe ya kukinga au vipengee maalum) bila kuharibu vipengee vinavyozunguka, ulandanishi kamili unaotolewa na coaxial vision ni bora zaidi. Mifumo ya nje ya mhimili hukabiliwa zaidi na 'kuteleza' baada ya muda kutokana na upanuzi wa joto au mtetemo wa mitambo unaoathiri kipandikizi tofauti cha kamera.
Jedwali la Muhtasari
Kipengele |
Pseudo-Coaxial Vision (TTL) |
Maono ya Nje ya Mhimili (Mhimili wa Upande) |
Hitilafu ya Parallax |
Hakuna (usahihi wa juu katika urefu tofauti) |
Juu (Nyeti kwa mabadiliko ya urefu wa Z) |
Urekebishaji |
Rahisi (pointi 1 au pointi 9, thabiti sana) |
Changamano (Inahitaji uratibu wa ramani mara kwa mara) |
Mahitaji ya Nafasi |
Kompakt (Imeunganishwa ndani ya macho) |
Bulky (Inahitaji kupachika nje) |
Upotoshaji wa Mtazamo |
Chini (Mwonekano wa juu chini) |
Juu (Mwonekano wa Trapezoidal unahitaji marekebisho) |
Usahihi |
Juu (Inafaa kwa PCB zenye msongamano mkubwa) |
Kati (Inakubalika kwa maeneo makubwa yaliyo wazi) |
Hitimisho:
Kwa tasnia ya ufuatiliaji wa PCB, ambapo usahihi, vikwazo vya nafasi, na kushughulikia ukurasa wa vita wa PCB ni muhimu, Pseudo-Coaxial Vision ndilo chaguo bora zaidi. Inahakikisha kwamba msimbo wa Matrix ya Data umetiwa alama pale inapokusudiwa na inaweza kuthibitishwa mara moja, na hivyo kuongeza Mazao ya Kwanza ya Pasi (FPY) ya njia ya uzalishaji.











