ข้อดีของการมองเห็นหลอกโคแอกเซียลในการมาร์กด้วยเลเซอร์บน PCB
ต่อไปนี้เป็นบทสรุปข้อดีของการใช้ การมองเห็นแบบ Pseudo-Coaxial (มักเรียกในบริบทนี้ว่าการมองเห็นผ่านเลนส์หรือ TTL หรือการมองเห็นแบบโคแอกเชียลผ่านตัวรวมลำแสง) เมื่อเปรียบเทียบกับการมองเห็นแบบ Off-Axis (Side-Axis) สำหรับการมาร์กด้วยเลเซอร์แบบอินไลน์ของรหัส QR บน PCB
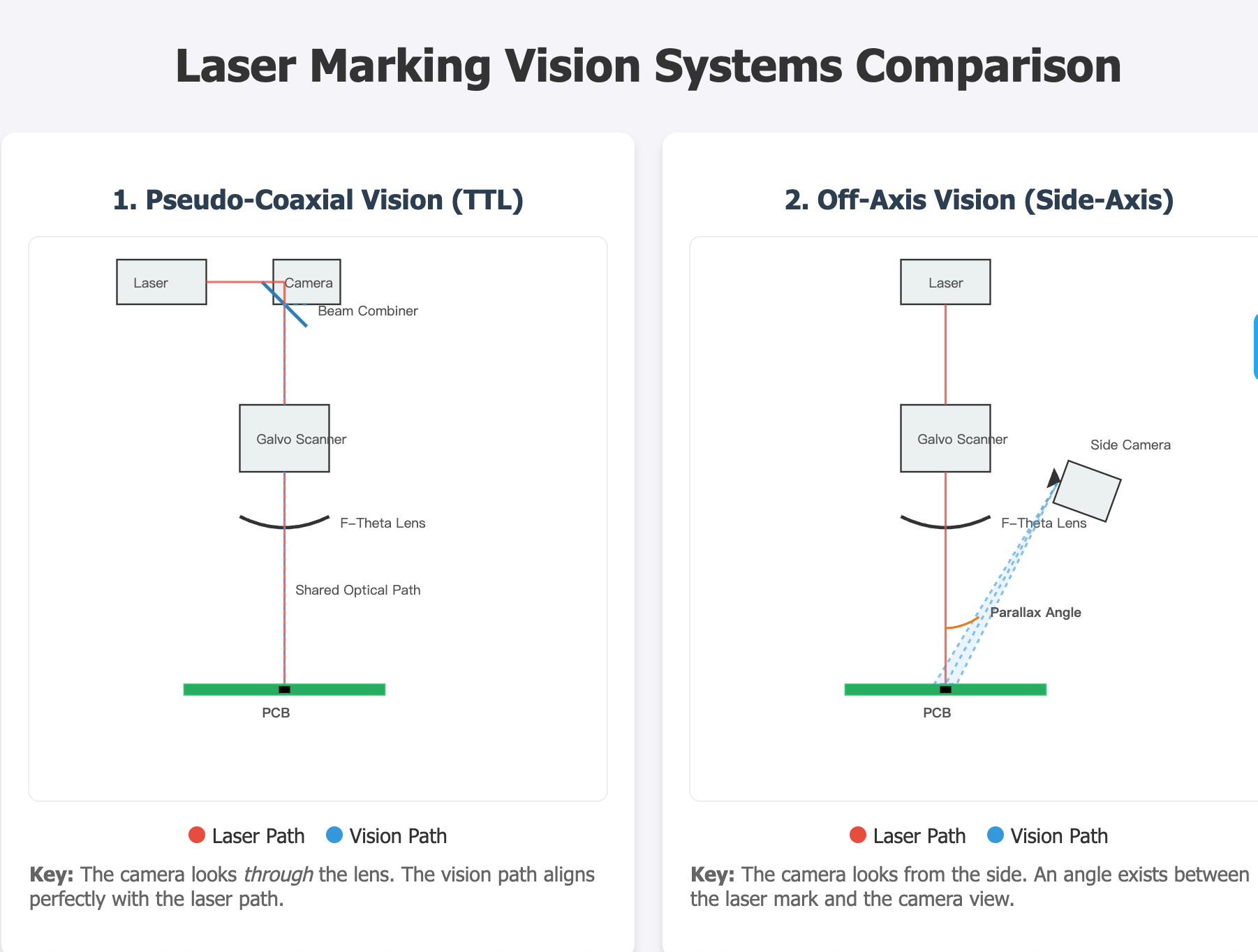
การมองเห็นหลอกโคแอกเชียล
( การมองเห็นนอกแกน (Side-Axis) )
1. ความแม่นยำในการสอบเทียบและการจัดตำแหน่งที่เหนือกว่า
• เส้นทางแสงโดยตรง: ในระบบหลอกโคแอกเชียล กล้องมองภาพใช้เส้นทางแสงเดียวกัน (โดยปกติจะผ่านกระจกไดโครอิกหรือตัวรวมลำแสง) เช่นเดียวกับลำแสงเลเซอร์ ซึ่งหมายความว่ากล้อง 'มองเห็น' เหมือนกับที่เลเซอร์ 'มองเห็น'
• การกำจัดข้อผิดพลาดพารัลแลกซ์: กล้องที่อยู่นอกแกนจะมองเป้าหมายจากมุมหนึ่ง หากความสูงของ PCB เปลี่ยนแปลง (การบิดเบี้ยว) หรือโฟกัสของแกน Z เปลี่ยนไป ตำแหน่งของเครื่องหมายในมุมมองของกล้องจะเปลี่ยนไปโดยสัมพันธ์กับตำแหน่งเลเซอร์จริง การมองเห็นแบบหลอกโคแอกเซียลช่วยลดข้อผิดพลาดพารัลแลกซ์นี้ ทำให้มั่นใจได้ว่าเลเซอร์จะทำเครื่องหมายตรงตำแหน่งที่ระบบการมองเห็นกำหนดเป้าหมาย โดยไม่คำนึงถึงความสูงที่แปรผันเล็กน้อย
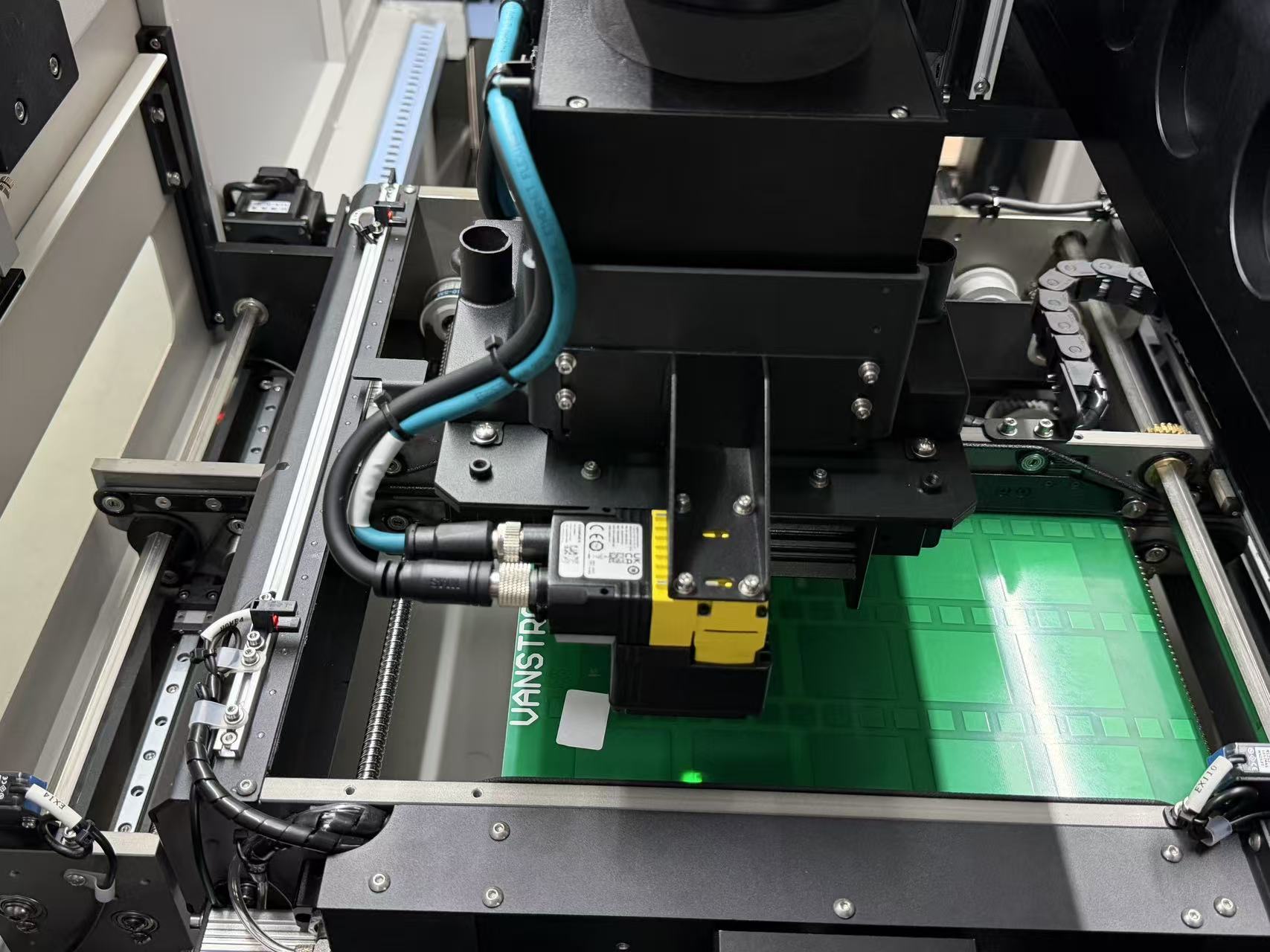
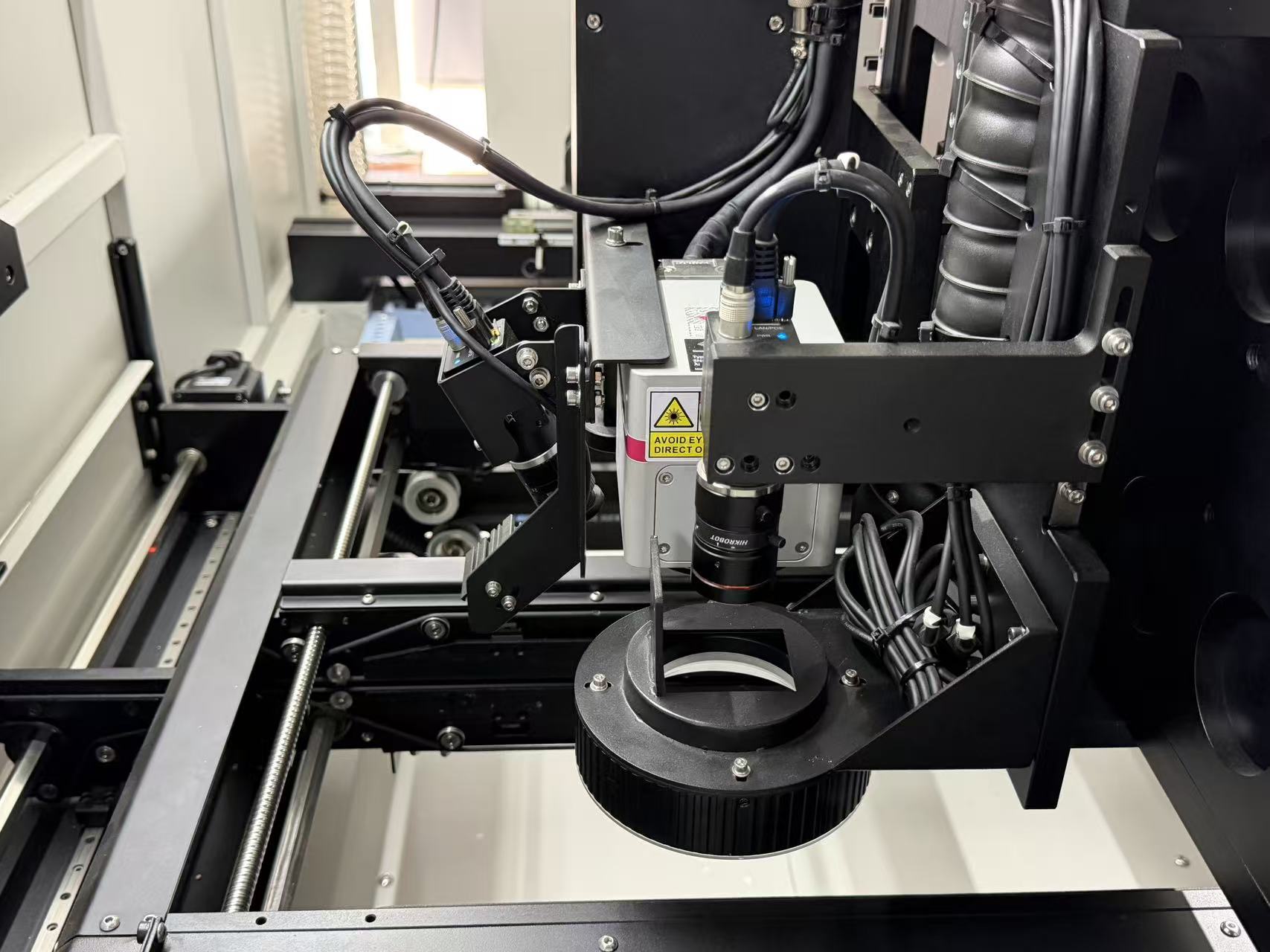
2. การออกแบบกลไกที่กะทัดรัดและเรียบง่าย
• ประสิทธิภาพพื้นที่: อุปกรณ์การจัดการ PCB แบบอินไลน์มักมีพื้นที่จำกัด การตั้งค่าโคแอกเซียลเทียมจะรวมกล้องเข้ากับหัวสแกนกัลวาโนมิเตอร์โดยตรงหรือเส้นทางแสงเลเซอร์ ซึ่งช่วยลดความจำเป็นในการมีขายึดกล้องภายนอกขนาดใหญ่และอุปกรณ์ส่องสว่างที่ห้อยอยู่ด้านข้างของหัวเลเซอร์
• ลดการรบกวน: ไม่มีความเสี่ยงที่กล้องภายนอกจะชนกับส่วนประกอบบน PCB หรือกลไกสายพานลำเลียง
3. 'สิ่งที่คุณเห็นคือสิ่งที่คุณทำเครื่องหมาย' แบบเรียลไทม์ (WYSIWYM)
• การจำลองการมาร์กล่วงหน้า: คุณสามารถวางเทมเพลตการมาร์กซ้อนทับบนฟีดวิดีโอสดได้โดยตรงด้วยความแม่นยำสูงมาก ทำให้การตั้งค่าและการสร้างสูตรอาหารง่ายขึ้นมากสำหรับผู้ปฏิบัติงาน
• การยืนยันหลังการมาร์ก: เนื่องจากกล้องมองผ่านเลนส์สแกน (เลนส์ F-theta) จึงสามารถตรวจสอบคุณภาพและตำแหน่งของมาร์กได้ทันทีโดยไม่ต้องย้ายกัลวาโนมิเตอร์หรือ PCB ไปยังสถานีตรวจสอบแยกต่างหาก
4. ความทนทานต่อการบิดเบี้ยวของ PCB และข้อผิดพลาดในการกำหนดตำแหน่ง
• ความเข้ากันได้ของโฟกัสอัตโนมัติ: หากระบบติดตั้งหน่วยโฟกัสไดนามิก 3 มิติ กล้องโคแอกเซียลสามารถช่วยในการกำหนดระนาบโฟกัสได้แม่นยำกว่ากล้องที่ทำมุม ซึ่งมีปัญหากับการรับรู้เชิงลึก
• การแก้ไขความผิดเพี้ยน: กล้องนอกแกนจำเป็นต้องมีการปรับเทียบซอฟต์แวร์ที่ซับซ้อนเพื่อแก้ไขความผิดเพี้ยนรูปสี่เหลี่ยมคางหมูที่เกิดจากมุมมองภาพ การมองเห็นแบบโคแอกเซียลจะมองฟิลด์ (ส่วนใหญ่) ในแนวตั้งฉาก ซึ่งลดการบิดเบือนของเปอร์สเปคทีฟ และลดความซับซ้อนของอัลกอริธึมการประมวลผลภาพที่จำเป็นสำหรับการอ่านโค้ด Data Matrix (ECC200) ความหนาแน่นสูง
5. การวางตำแหน่งมาร์กที่มีความแม่นยำสูงบนส่วนประกอบขนาดเล็ก
• การจัดแนวขอบเขตการมองเห็น (FOV): สำหรับ PCB ความหนาแน่นสูงที่ต้องวางรหัส QR ไว้ในพื้นที่ขนาดเล็กมาก (เช่น กระป๋องป้องกันหรือชิ้นส่วนเฉพาะ) โดยไม่สร้างความเสียหายให้กับส่วนประกอบโดยรอบ การซิงโครไนซ์พิกัดสัมบูรณ์ที่ได้รับจากการมองเห็นแบบโคแอกเซียลจะดีกว่า ระบบที่อยู่นอกแกนมีแนวโน้มที่จะ 'ดริฟท์' เมื่อเวลาผ่านไปมากกว่า เนื่องจากการขยายตัวทางความร้อนหรือการสั่นสะเทือนทางกลที่ส่งผลต่อตัวยึดกล้องที่แยกจากกัน
ตารางสรุป
คุณสมบัติ |
การมองเห็นหลอกโคแอกเซียล (TTL) |
มุมมองนอกแกน (Side-Axis) |
ข้อผิดพลาดพารัลแลกซ์ |
ไม่มี (ความแม่นยำสูงที่ความสูงต่างกัน) |
สูง (ไวต่อการเปลี่ยนแปลงความสูง Z) |
การสอบเทียบ |
ธรรมดา (1 จุดหรือ 9 จุด มีความเสถียรสูง) |
ซับซ้อน (ต้องมีการทำแผนที่พิกัดบ่อยครั้ง) |
ความต้องการพื้นที่ |
กะทัดรัด (รวมเลนส์ภายใน) |
ขนาดใหญ่ (ต้องติดตั้งภายนอก) |
การบิดเบือนมุมมอง |
ต่ำ (มุมมองจากบนลงล่าง) |
สูง (มุมมองสี่เหลี่ยมคางหมูต้องมีการแก้ไข) |
ความแม่นยำ |
สูง (เหมาะสำหรับ PCB ความหนาแน่นสูง) |
ปานกลาง (ใช้ได้สำหรับพื้นที่โล่งขนาดใหญ่) |
สรุป:
สำหรับอุตสาหกรรมการตรวจสอบย้อนกลับของ PCB ซึ่ง ความแม่นยำ พื้นที่จำกัด และการจัดการการบิดเบี้ยวของ PCB เป็นสิ่งสำคัญ Pseudo-Coaxial Vision เป็นตัวเลือกที่เหนือกว่า ช่วยให้มั่นใจได้ว่ารหัส Data Matrix ได้รับการทำเครื่องหมายใน ตำแหน่งที่ ต้องการและสามารถตรวจสอบได้ทันที ช่วยเพิ่ม First Pass Yield (FPY) ของสายการผลิตให้สูงสุด











