Переваги псевдокоаксіального бачення в лазерному маркуванні друкованих плат
Ось короткий виклад переваг використання псевдокоаксіального бачення (часто в цьому контексті його називають крізь об’єктив або бачення TTL, або коаксіальне бачення через об’єднувач променів) порівняно з позаосі (по бічній осі) баченням для вбудованого лазерного маркування QR-кодів на друкованих платах.
Псевдокоаксіальне бачення
( Позаосі (Бічна вісь) Бачення )
1. Висока точність калібрування та вирівнювання
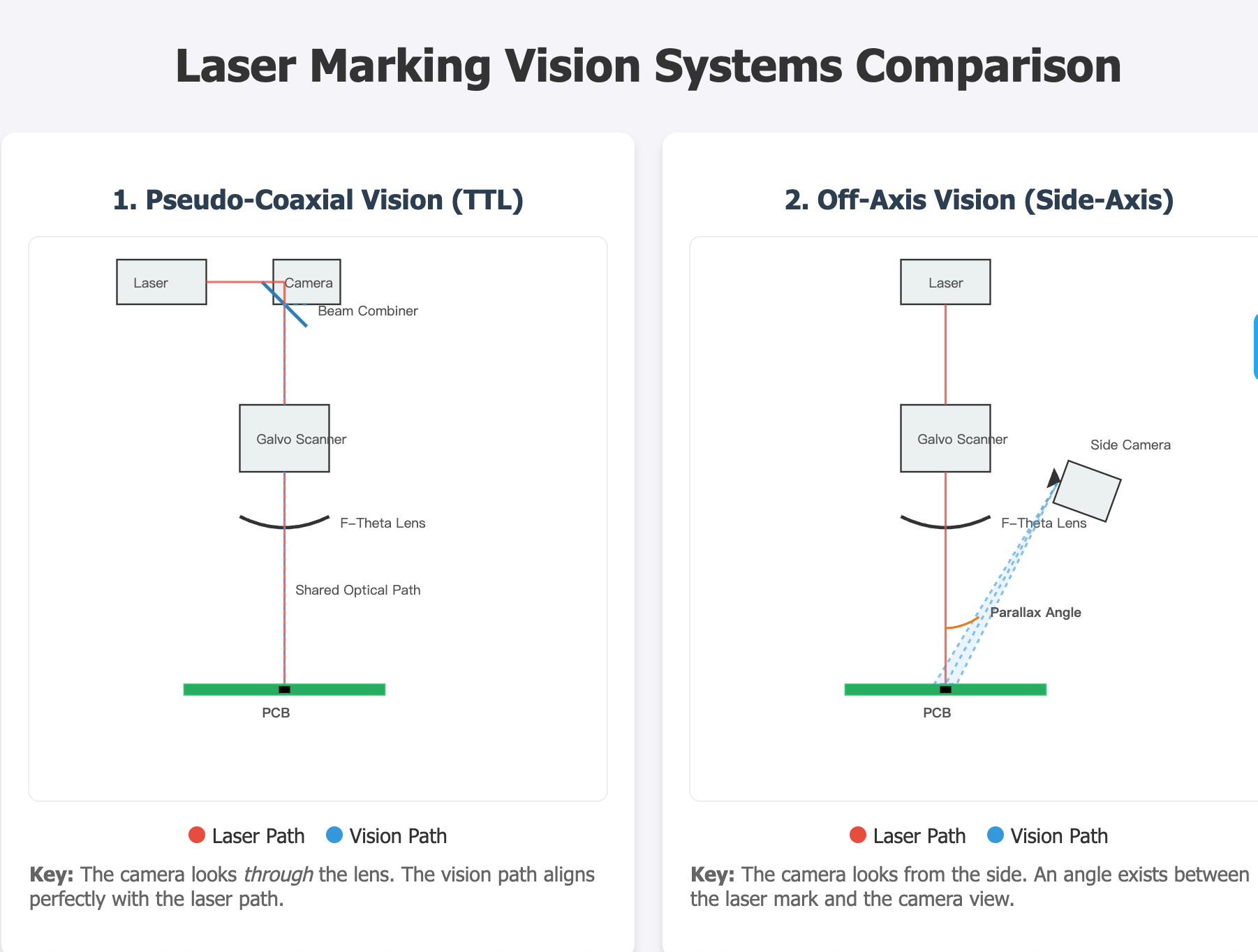
• Прямий оптичний шлях: у псевдокоаксіальній системі відеокамера використовує той самий оптичний шлях (зазвичай через дихроїчне дзеркало або об’єднувач променів), що й лазерний промінь. Це означає, що камера 'бачить' саме те, що 'бачить' лазер.
• Усунення помилки паралакса: позаосьові камери бачать ціль під кутом. Якщо висота друкованої плати змінюється (деформація) або фокус осі Z зміщується, положення позначки в полі зору камери зміщується відносно фактичного положення лазера. Псевдокоаксіальне бачення усуває цю помилку паралакса, забезпечуючи лазерні позначки саме там, де націлена система бачення, незалежно від незначних коливань висоти.
2. Компактна та спрощена механічна конструкція
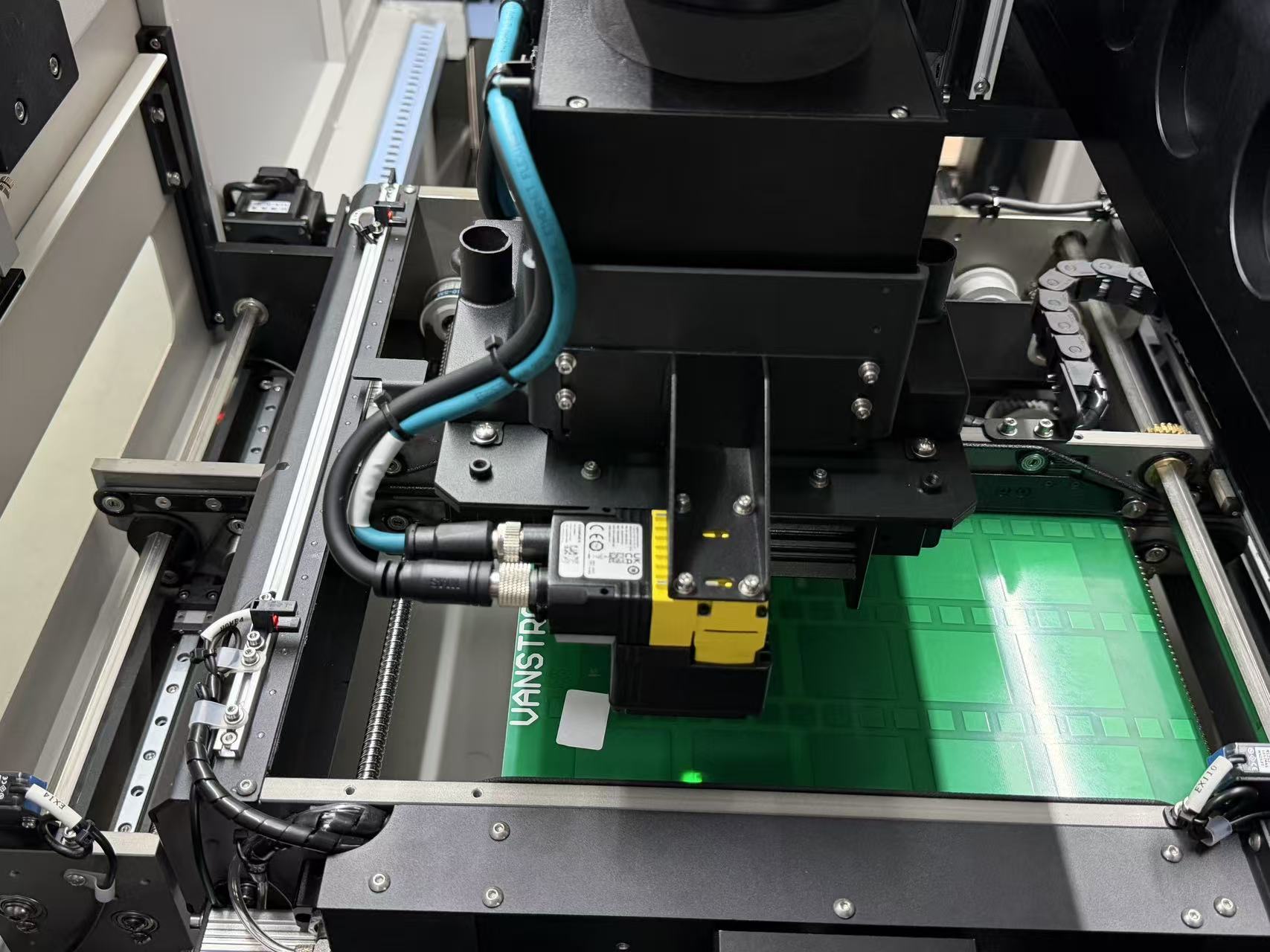
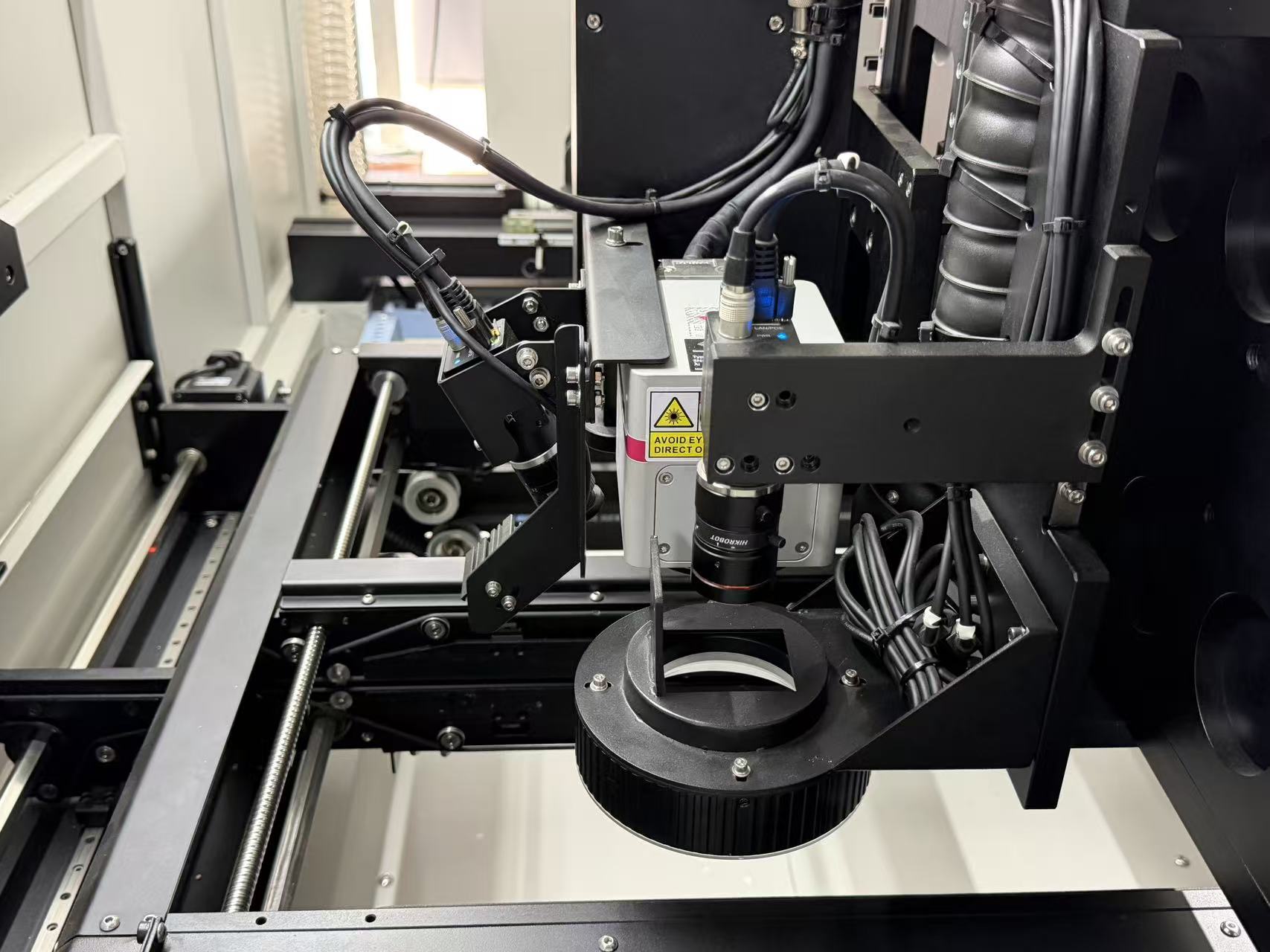
• Ефективність простору: вбудоване обладнання для обробки друкованих плат часто має обмежений простір. Псевдокоаксіальна установка інтегрує камеру безпосередньо в скануючу головку гальванометра або оптичний шлях лазера. Це усуває потребу в громіздких зовнішніх кронштейнах для камер і освітлювальних приладах, що звисають збоку лазерної головки.
• Зменшене втручання: відсутній ризик фізичного зіткнення зовнішньої камери з компонентами на друкованій платі або конвеєрному механізмі.
3. «Що ви бачите, те й позначаєте» в реальному часі (WYSIWYM)
• Симуляція попереднього маркування: ви можете накласти шаблон маркування безпосередньо на живе відео з надзвичайно високою точністю. Це робить налаштування та створення рецептів набагато більш інтуїтивно зрозумілими для операторів.
• Перевірка після маркування: оскільки камера дивиться крізь скануючу лінзу (F-тета-лінзу), вона може негайно перевірити якість та положення маркування, не переміщуючи гальванометр або друковану плату на окрему станцію перевірки.
4. Стійкість до викривлення друкованої плати та помилок позиціонування
• Сумісність із автофокусуванням: якщо система обладнана блоком динамічного 3D-фокусування, коаксіальна камера може допомогти у визначенні фокальної площини точніше, ніж кутова камера, яка має проблеми із сприйняттям глибини.
• Корекція спотворень: позаосьові камери вимагають складного програмного калібрування для виправлення трапецієподібних спотворень, викликаних кутом огляду. Коаксіальне бачення переглядає поле (переважно) перпендикулярно, зменшуючи спотворення перспективи та спрощуючи алгоритми обробки зображень, необхідні для зчитування кодів матриці даних високої щільності (ECC200).
5. Високоточне розміщення міток на малих компонентах
• Вирівнювання поля зору (FOV): для друкованих плат високої щільності, де QR-коди повинні бути розміщені на дуже малих ділянках (наприклад, екрануючих банках або певних опорних точках), не пошкоджуючи навколишні компоненти, абсолютна синхронізація координат, що забезпечується коаксіальним баченням, є кращою. Позаосьові системи більш схильні до «дрейфу» з часом через теплове розширення або механічну вібрацію, що впливає на окреме кріплення камери.
Зведена таблиця
Особливість |
Псевдокоаксіальне бачення (TTL) |
Позаосьовий огляд (бічна вісь) |
Помилка паралакса |
Немає (висока точність на різних висотах) |
Високий (чутливий до змін Z-висоти) |
Калібрування |
Простий (1 або 9 точок, дуже стабільний) |
Складний (вимагає частого відображення координат) |
Вимоги до простору |
Компактний (інтегрована внутрішня оптика) |
Громіздкий (вимагає зовнішнього кріплення) |
Спотворення перспективи |
Низький (вигляд зверху вниз) |
Високий (трапецієподібний вигляд потребує корекції) |
Точність |
Високий (ідеальний для друкованих плат високої щільності) |
Середній (прийнятний для великих чистих областей) |
Висновок:
для індустрії відстеження друкованих плат, де точність, обмеження простору та керування деформацією друкованої плати , критично важливі Pseudo-Coaxial Vision є найкращим вибором. Це гарантує, що код Data Matrix буде позначено саме там, де призначено, і його можна негайно перевірити, максимізуючи продуктивність першого проходу (FPY) виробничої лінії.











