ຂໍ້ໄດ້ປຽບຂອງ Pseudo-Coaxial Vision ໃນ PCB Laser Marking
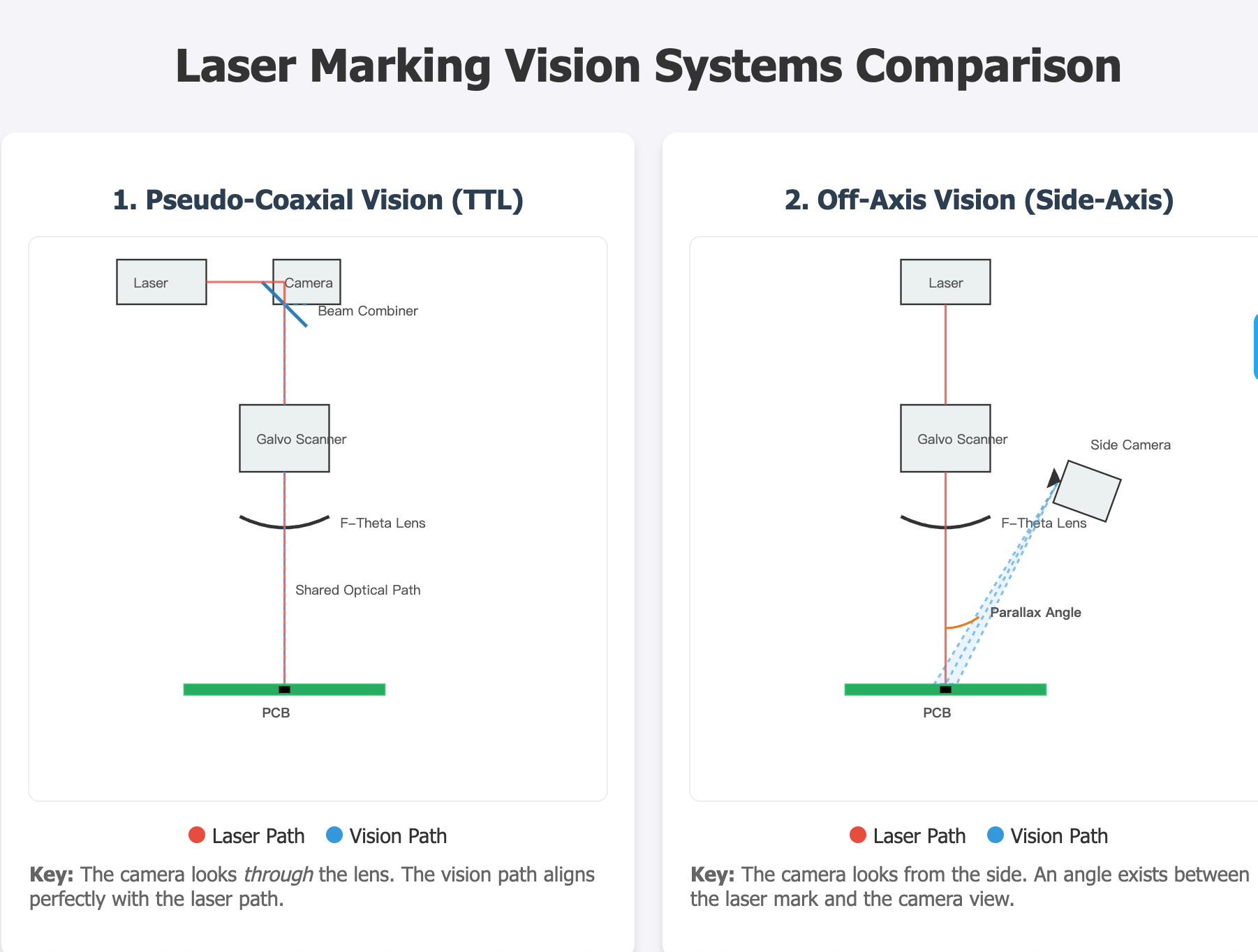
ນີ້ແມ່ນບົດສະຫຼຸບຂອງຂໍ້ໄດ້ປຽບຂອງການນໍາໃຊ້ Pseudo-Coaxial Vision (ມັກຈະເອີ້ນວ່າໃນສະພາບການນີ້ວ່າເປັນວິໄສທັດຜ່ານທາງເລນຫຼື TTL, ຫຼືວິໄສທັດ Coaxial ຜ່ານ beam ລວມ) ເມື່ອທຽບກັບ Off-Axis (Side-Axis) ວິໄສທັດສໍາລັບການເຮັດເຄື່ອງຫມາຍ laser inline ຂອງລະຫັດ QR ໃນ PCBs.
Pseudo-Coaxial ວິໄສທັດ
( Off-Axis (Side-Axis) ວິໄສທັດ )
1. ການປັບທຽບຊັ້ນສູງ ແລະຄວາມຖືກຕ້ອງຂອງການຈັດຮຽງ
• Direct Optical Path: ໃນລະບົບ pseudo-coaxial, ກ້ອງຖ່າຍຮູບວິໄສທັດແບ່ງປັນເສັ້ນທາງ optical ດຽວກັນ (ປົກກະຕິແລ້ວຜ່ານກະຈົກ dichroic ຫຼື beam ລວມ) ເປັນເລເຊີ beam. ນີ້ຫມາຍຄວາມວ່າກ້ອງຖ່າຍຮູບ 'ເຫັນ' ແທ້ສິ່ງທີ່ laser 'ເຫັນ.'
• ການລົບລ້າງຄວາມຜິດພາດຂອງ Parallax: ກ້ອງນອກແກນເບິ່ງເປົ້າໝາຍຈາກມຸມ. ຖ້າຄວາມສູງຂອງ PCB ປ່ຽນແປງ (warpage) ຫຼືຈຸດສຸມໃສ່ແກນ Z ປ່ຽນ, ຕໍາແຫນ່ງຂອງເຄື່ອງຫມາຍໃນມຸມເບິ່ງຂອງກ້ອງຖ່າຍຮູບຈະປ່ຽນໄປກັບຕໍາແຫນ່ງເລເຊີຕົວຈິງ. Pseudo-coaxial vision ລົບລ້າງຄວາມຜິດພາດ parallax ນີ້, ໃຫ້ແນ່ໃຈວ່າ laser marks ແນ່ນອນບ່ອນທີ່ລະບົບວິໄສທັດເປົ້າຫມາຍ, ໂດຍບໍ່ຄໍານຶງເຖິງການປ່ຽນແປງຄວາມສູງເລັກນ້ອຍ.
2. ການອອກແບບກົນຈັກກະທັດຮັດ ແລະງ່າຍດາຍ
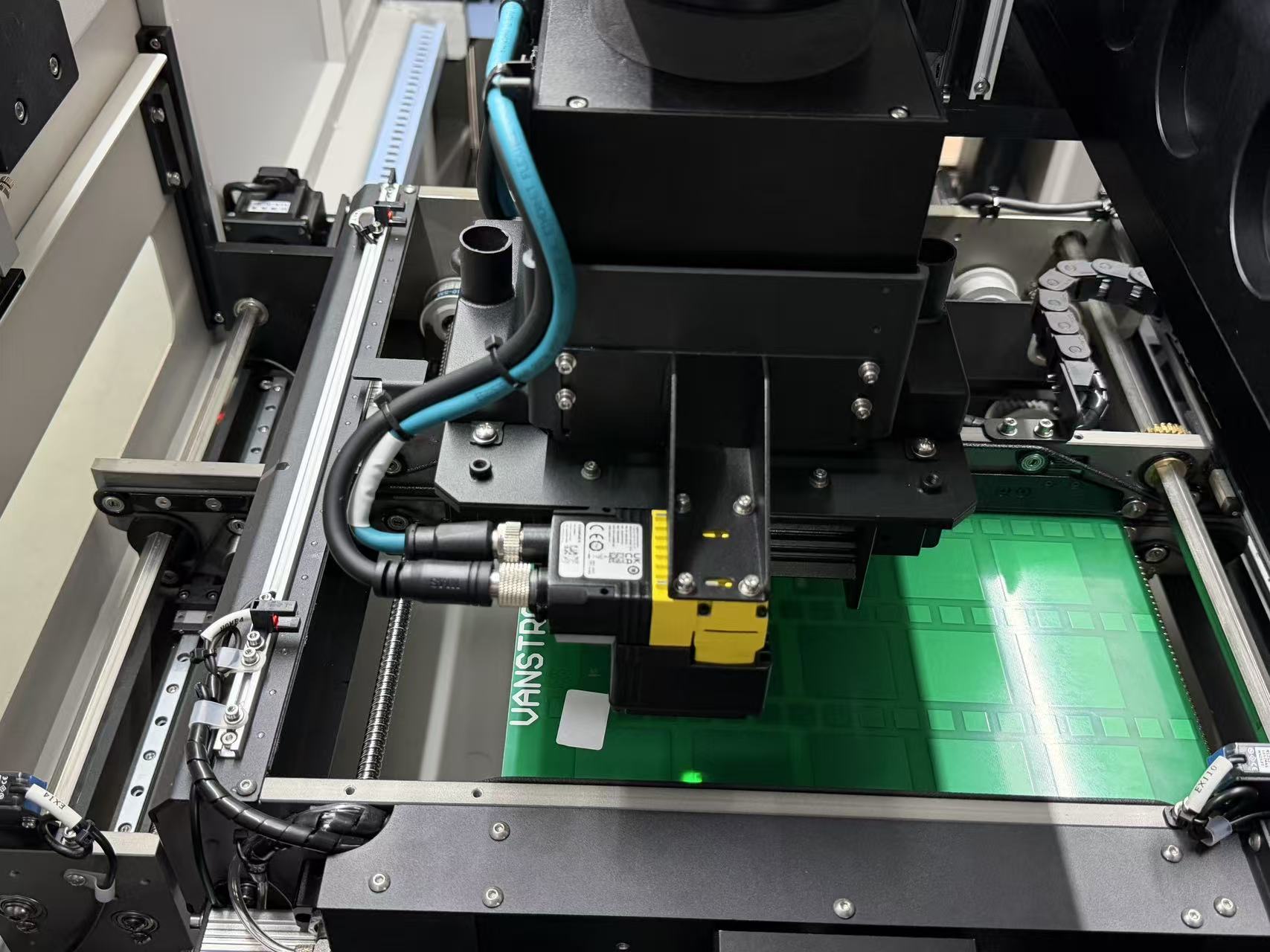
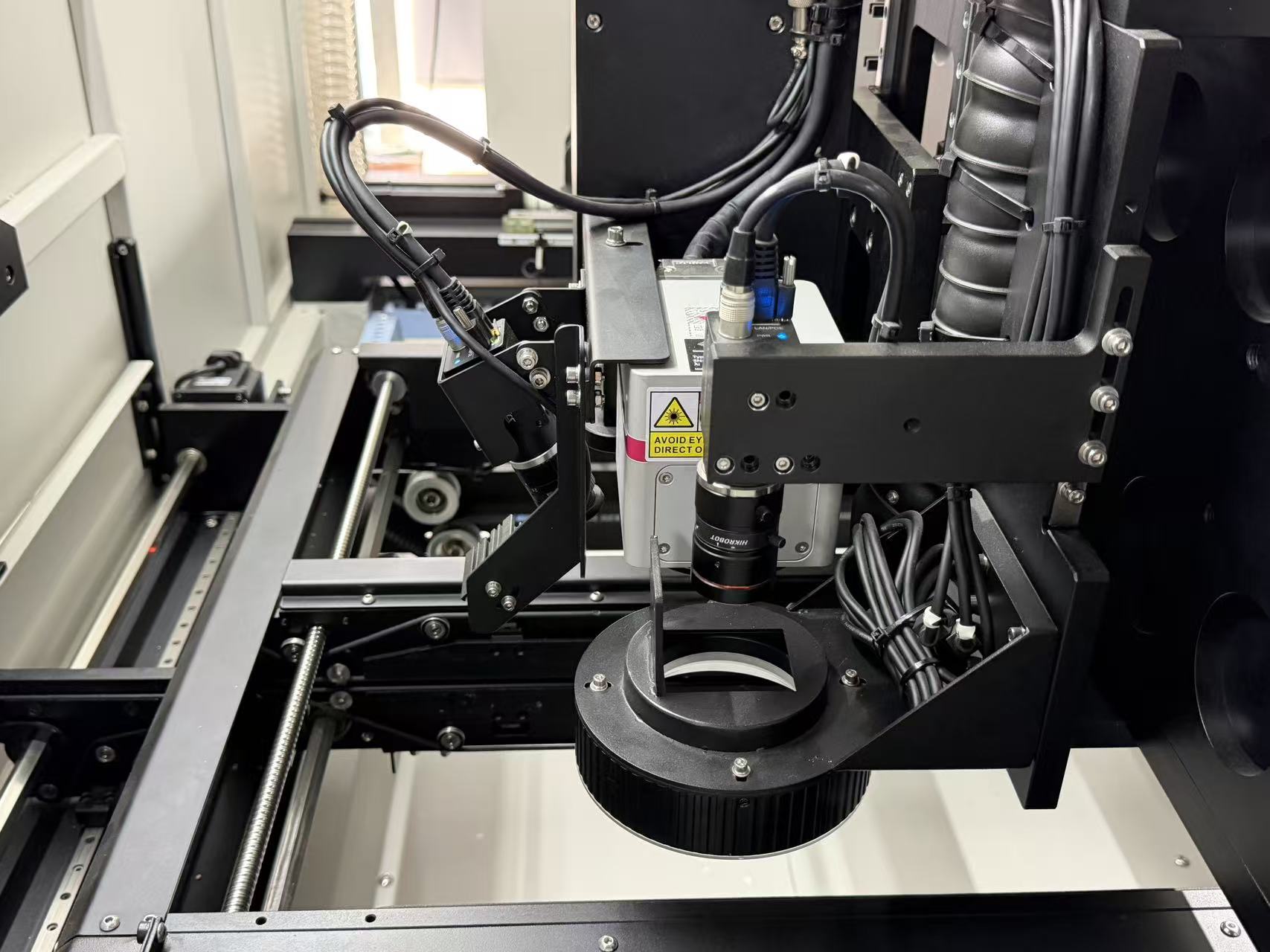
• ປະສິດທິພາບໃນພື້ນທີ່: ອຸປະກອນຈັດການ PCB ໃນເສັ້ນມັກຈະມີພື້ນທີ່ຈໍາກັດ. ການຕິດຕັ້ງ pseudo-coaxial ປະສົມປະສານກ້ອງຖ່າຍຮູບໂດຍກົງເຂົ້າໄປໃນຫົວສະແກນ galvanometer ຫຼືເສັ້ນທາງເລເຊີ optical. ນີ້ກໍາຈັດຄວາມຕ້ອງການສໍາລັບວົງເລັບກ້ອງຖ່າຍຮູບພາຍນອກຂະຫນາດໃຫຍ່ແລະອຸປະກອນເຮັດໃຫ້ມີແສງຫ້ອຍຢູ່ຂ້າງຂອງຫົວເລເຊີ.
• ຫຼຸດຜ່ອນການລົບກວນ: ບໍ່ມີຄວາມສ່ຽງທີ່ກ້ອງຖ່າຍຮູບພາຍນອກຈະຂັດກັນກັບອົງປະກອບໃນ PCB ຫຼືກົນໄກລໍາລຽງ.
3. ເວລາຈິງ 'ສິ່ງທີ່ທ່ານເຫັນແມ່ນສິ່ງທີ່ເຈົ້າໝາຍ' (WYSIWYM)
• ການຈຳລອງການໝາຍລ່ວງໜ້າ: ທ່ານສາມາດວາງທັບແມ່ແບບເຄື່ອງໝາຍໂດຍກົງໃສ່ຟີດວິດີໂອສົດດ້ວຍຄວາມແມ່ນຍໍາສູງ. ອັນນີ້ເຮັດໃຫ້ການຕັ້ງຄ່າ ແລະການສ້າງສູດອາຫານງ່າຍກວ່າສຳລັບຜູ້ປະກອບການ.
• ການກວດສອບຫຼັງເຄື່ອງໝາຍ: ເນື່ອງຈາກກ້ອງຖ່າຍຮູບເບິ່ງຜ່ານເລນສະແກນ (ເລນ F-theta), ມັນສາມາດກວດສອບຄຸນນະພາບເຄື່ອງໝາຍ ແລະ ຕໍາແໜ່ງໄດ້ທັນທີໂດຍບໍ່ຕ້ອງຍ້າຍ galvanometer ຫຼື PCB ໄປຫາສະຖານີກວດກາແຍກຕ່າງຫາກ.
4. ຄວາມທົນທານຕໍ່ PCB Warpage ແລະຄວາມຜິດພາດການຈັດຕໍາແຫນ່ງ
• ຄວາມເຂົ້າກັນໄດ້ຂອງໂຟກັສອັດຕະໂນມັດ: ຖ້າລະບົບຕິດຕັ້ງດ້ວຍໜ່ວຍໂຟກັສແບບໄດນາມິກ 3D, ກ້ອງ coaxial ສາມາດຊ່ວຍໃນການກຳນົດລະບົບໂຟກັສໄດ້ຢ່າງຖືກຕ້ອງກວ່າກ້ອງມຸມ, ເຊິ່ງຕໍ່ສູ້ກັບການຮັບຮູ້ຄວາມເລິກ.
• ການແກ້ໄຂການບິດເບືອນ: ກ້ອງນອກແກນຕ້ອງການການປັບຕົວຊອຟແວທີ່ຊັບຊ້ອນເພື່ອແກ້ໄຂການບິດເບືອນຂອງຮູບຊົງ trapezoidal ທີ່ເກີດຈາກມຸມເບິ່ງ. ວິໄສທັດ Coaxial ເບິ່ງພາກສະຫນາມ (ສ່ວນຫຼາຍແມ່ນ) perpendicularly, ຫຼຸດຜ່ອນການບິດເບືອນຂອງທັດສະນະແລະເຮັດໃຫ້ລະບົບການປະມວນຜົນຮູບພາບທີ່ງ່າຍດາຍທີ່ຕ້ອງການສໍາລັບການອ່ານລະຫັດ Data Matrix (ECC200) ທີ່ມີຄວາມຫນາແຫນ້ນສູງ.
5. ການຈັດວາງເຄື່ອງໝາຍຄວາມແມ່ນຍໍາສູງໃນອົງປະກອບຂະຫນາດນ້ອຍ
• Field of View (FOV) Alignment: ສໍາລັບ PCBs ທີ່ມີຄວາມຫນາແຫນ້ນສູງທີ່ລະຫັດ QR ຕ້ອງຖືກວາງໄວ້ໃນພື້ນທີ່ຂະຫນາດນ້ອຍຫຼາຍ (ຕົວຢ່າງ: ໄສ້ປ້ອງກັນຫຼື fiducials ສະເພາະ) ໂດຍບໍ່ມີການທໍາລາຍອົງປະກອບອ້ອມຂ້າງ, ການປະສານງານຢ່າງແທ້ຈິງທີ່ສະຫນອງໂດຍ coaxial vision ແມ່ນດີກວ່າ. ລະບົບ off-axis ມັກຈະເປັນ 'drift' ເມື່ອເວລາຜ່ານໄປເນື່ອງຈາກການຂະຫຍາຍຄວາມຮ້ອນຫຼືການສັ່ນສະເທືອນຂອງກົນຈັກຜົນກະທົບຕໍ່ການຍຶດກ້ອງຖ່າຍຮູບແຍກຕ່າງຫາກ.
ຕາຕະລາງສະຫຼຸບ
ຄຸນສົມບັດ |
Pseudo-Coaxial Vision (TTL) |
Off-Axis ວິໄສທັດ (Side-Axis) |
Parallax ຜິດພາດ |
ບໍ່ມີ (ຄວາມຖືກຕ້ອງສູງໃນລະດັບຄວາມສູງທີ່ແຕກຕ່າງກັນ) |
ສູງ (ອ່ອນໄຫວຕໍ່ກັບການປ່ຽນແປງຄວາມສູງ Z) |
ການປັບທຽບ |
ງ່າຍດາຍ (1 ຈຸດ ຫຼື 9 ຈຸດ, ມີຄວາມຫມັ້ນຄົງສູງ) |
ຊັບຊ້ອນ (ຕ້ອງການແຜນທີ່ປະສານງານເລື້ອຍໆ) |
ຄວາມຕ້ອງການພື້ນທີ່ |
ກະທັດຮັດ (ປະສົມປະສານພາຍໃນ optics) |
Bulky (ຕ້ອງການຕິດຕັ້ງພາຍນອກ) |
ການບິດເບືອນທັດສະນະ |
ຕ່ຳ (ມຸມເບິ່ງເທິງລົງລຸ່ມ) |
ສູງ (ມຸມເບິ່ງ trapezoidal ຕ້ອງການການແກ້ໄຂ) |
ຄວາມຊັດເຈນ |
ສູງ (ເຫມາະສໍາລັບ PCBs ທີ່ມີຄວາມຫນາແຫນ້ນສູງ) |
ຂະຫນາດກາງ (ຮັບໄດ້ສໍາລັບພື້ນທີ່ທີ່ຈະແຈ້ງຂະຫນາດໃຫຍ່) |
ສະຫຼຸບ:
ສໍາລັບອຸດສາຫະກໍາການຕິດຕາມ PCB, ບ່ອນທີ່ ຄວາມແມ່ນຍໍາ, ຂໍ້ຈໍາກັດຂອງຊ່ອງ, ແລະການຈັດການ warpage PCB ແມ່ນສໍາຄັນ, Pseudo-Coaxial Vision ແມ່ນທາງເລືອກທີ່ດີກວ່າ. ມັນຮັບປະກັນວ່າລະຫັດ Data Matrix ຖືກຫມາຍຢ່າງແນ່ນອນ ໃນບ່ອນ ທີ່ຕັ້ງໃຈແລະສາມາດກວດສອບໄດ້ທັນທີ, ເພີ່ມຜົນຜະລິດ First Pass Yield (FPY) ຂອງສາຍການຜະລິດ.











